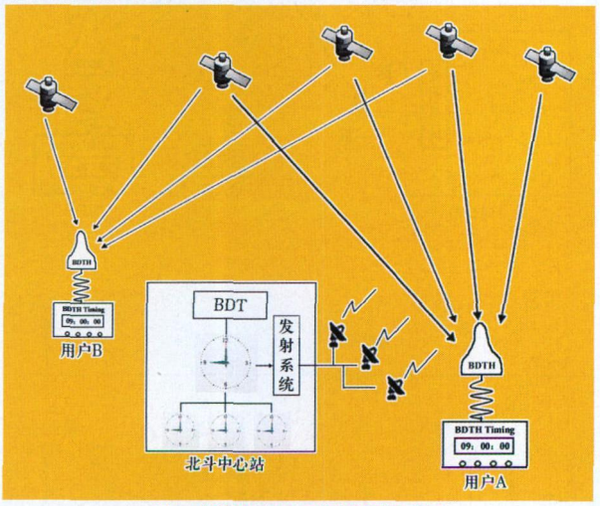
GPS导航系统的基本原理是测量已知位置的卫星与用户的接收机之间的距离,然后综合多颗卫星的数据就可以知道接收机的具体位置。为此,可以根据机载时钟记录的时间在卫星星历中找到卫星的位置。用户到卫星的距离是通过记录卫星信号传播到用户的时间,然后乘以光速得到的(由于电离层在大气中的干扰,这个距离为不是用户与卫星之间的真实距离,而是 Pseudo-Range (PR):当 GPS 卫星正常工作时,它将以二进制符号 1 和 0 组成的伪随机码(简称伪码)连续发送导航电文。 GPS 系统使用的伪码有两种,即民用 C/A 码和军用 P(Y) 代码。C/A码频率1.023MHz,重复周期1毫秒,码间距1微秒,相当于300m;P码频率10.23MHz,重复周期266.4天,码间距0.1微秒,相当于30m。Y码是在P码的基础上形成的,保密性能更好。导航电文包括卫星星历、工作状态、时钟改正、电离层延迟改正、大气折射改正等。它从卫星信号中解调并以 50b/s 调制在载波频率上传输。导航电文的每个主帧包含5个子帧,每个帧长6s。前三帧各有 10 个字符;它每 30 秒重复一次,每小时更新一次。数据块1、2、3,其中最重要的是星历数据。当用户收到导航电文时,提取卫星时间并与自己的时钟进行比较,就可以知道卫星与用户的距离,然后利用导航电文中的卫星星历数据计算出卫星的位置。消息被传输,用户在WGS-84大地坐标系中的位置和速度就可以知道了。导航电文的每个主帧包含5个子帧,每个帧长6s。前三帧各有 10 个字符;它每 30 秒重复一次,每小时更新一次。数据块1、2、3,其中最重要的是星历数据。当用户收到导航电文时,提取卫星时间并与自己的时钟进行比较,就可以知道卫星与用户的距离,然后利用导航电文中的卫星星历数据计算出卫星的位置。消息被传输,用户在WGS-84大地坐标系中的位置和速度就可以知道了。导航电文的每个主帧包含5个子帧,每个帧长6s。前三帧各有 10 个字符;它每 30 秒重复一次,每小时更新一次。数据块1、2、3,其中最重要的是星历数据。当用户收到导航电文时,提取卫星时间并与自己的时钟进行比较,就可以知道卫星与用户的距离,然后利用导航电文中的卫星星历数据计算出卫星的位置。消息被传输俄罗斯用什么卫星定位系统,用户在WGS-84大地坐标系中的位置和速度就可以知道了。它每 30 秒重复一次,每小时更新一次。数据块1、2、3,其中最重要的是星历数据。当用户收到导航电文时,提取卫星时间并与自己的时钟进行比较,就可以知道卫星与用户的距离,然后利用导航电文中的卫星星历数据计算出卫星的位置。消息被传输,用户在WGS-84大地坐标系中的位置和速度就可以知道了。它每 30 秒重复一次,每小时更新一次。数据块1、2、3,其中最重要的是星历数据。当用户收到导航电文时,提取卫星时间并与自己的时钟进行比较,就可以知道卫星与用户的距离,然后利用导航电文中的卫星星历数据计算出卫星的位置。消息被传输,用户在WGS-84大地坐标系中的位置和速度就可以知道了。
可见,GPS导航系统卫星部分的作用是不断地传输导航电文。但是由于用户接收机使用的时钟和卫星机载时钟不能一直同步,所以除了用户的三维坐标x、y、z之外,还有一个Δt,即卫星与卫星的时间差。接收器,作为未知数引入。然后用 4 个方程求解这 4 个未知数。所以如果你想知道接收器的位置俄罗斯用什么卫星定位系统,你必须至少能接收到4颗卫星。
计算机GPS软件GPS接收机可以接收精确到纳秒级的时间信息,可用于计时;预测星历用于预测未来几个月卫星的大致位置;用于计算定位所需的卫星坐标。广播星历,精度几米到几十米(每颗卫星不同,随时变化);GPS系统信息,如卫星状态等。

卫星到接收器的距离可以通过测量GPS接收器的编码得到。因为它包含接收机卫星时钟的误差和大气传播的误差,所以称为伪距。针对0A码测得的伪距称为UA码伪距,精度约为20米,针对P码测得的伪距称为P码伪距,精度约为2米。
GPS接收器对接收到的卫星信号进行解码或在去除载波上调制的信息后使用其他技术恢复载波。严格来说,载波相位应该称为载波差拍相位,是接收到的卫星信号受多普勒频移影响的载波相位与接收机本振产生的信号相位之差。一般在接收机时钟确定的纪元时间进行测量,并保持对卫星信号的跟踪,可以记录相位变化值,但接收机和卫星振荡器在开始时的初始相位值观察结果未知。初始历元的相位整数也是未知的,即整数模糊度,这只能作为数据处理中的参数来解决。相位观测的精度高达毫米,但前提是要解决整圆的模糊性,所以相位观测只能在有相对定位且有一段连续观测的情况下使用,而且只能达到优于米级的定位精度。可以使用相位观察。
根据定位方式,GPS定位分为单点定位和相对定位(差分定位)。单点定位是一种根据接收机的观测数据确定接收机位置的方法。它只能使用伪距观测,可用于车辆和船舶的粗略导航和定位。相对定位(差分定位)是一种根据两个或多个接收机的观测数据确定观测点之间相对位置的方法。使用相位观测的相对定位。
GPS观测包括卫星和接收机时钟误差、大气传播延迟和多径效应等误差,在定位计算过程中也会受到卫星广播星历误差的影响。可以取消或减弱,因此定位精度会大大提高。双频接收机根据对两个频率的观测可以抵消大气中电离层误差的主要部分。),应使用双频接收机。
相对论为 GPS 提供所需的校正
全球定位系统 (GPS) 卫星的定时信号提供纬度、经度和高度信息,而精确的距离测量需要精确的时钟。因此,精确的 GPS 接收器使用相对论效应。
精确到 30 米以内的 GPS 接收器意味着它利用了相对论效应。“如果不考虑相对论效应,卫星上的时钟与地球时钟不同步,”华盛顿大学物理学家克利福德·M·威尔解释道。相对论说,随着时间的推移,快速移动的物体比静止的物体移动得更慢。威尔计算出每颗 GPS 卫星每小时行进约 1.40,000 公里,这意味着其机载原子钟每天比地球上的时钟慢 7 微秒。
引力对时间产生了更大的相对论效应。在大约 20,000 公里的高度,GPS 卫星所承受的引力大约是地面的四分之一。结果是车载时钟每天快 45 微秒,而 GPS 总共有 38 微秒的偏差。“如果不对卫星进行频率补偿,这将增加每天 11 公里的误差,”阿什比解释说。(效果实际上更复杂,因为卫星沿着偏心轨道运行,有时离地球更近,有时离地球更近。更远。)